热点资讯
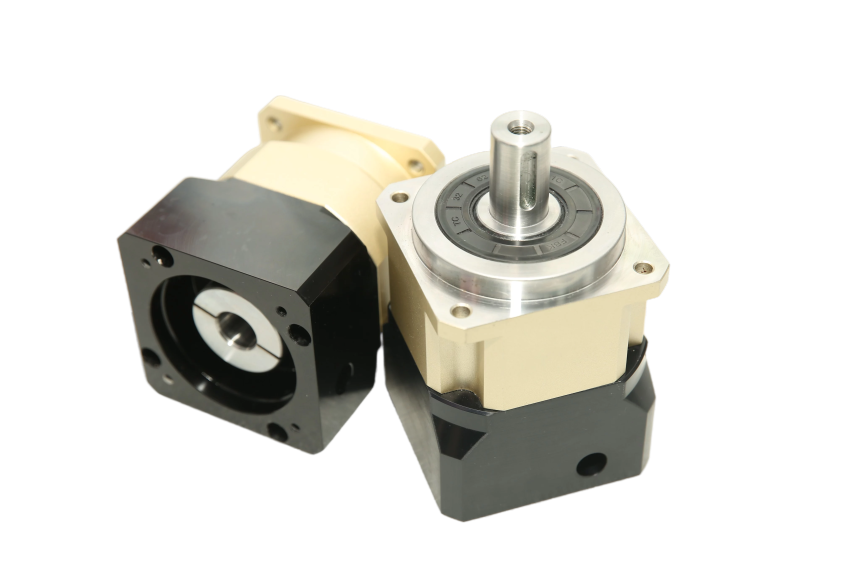
禹谟镇机电设备直连式BD120A-L2-25-B1-S9自锁用伺服减速机
文章来源:ymcdkj
发布时间:2024-05-09 19:23:02
B1-S9自锁用伺服减速机
广泛化我国高空作业行业尚处于高速发展的初期,有很大的发展空间,应大力推动高空作业更广泛的使用,可以从以下几个方面入手:制定相关政策法规推行文明、、安全的施工方式,淘汰落后的登高作业方式。提高企业经济效益和劳动力成本将促使大量企业普遍使用高空作业设备,促进高空作业行业的飞速发展;加快经济发展使社会基础设施运行和保障要求越来越高,电力、照明、通讯等行业的发展将促进高空作业行业的发展。
禹谟镇机电设备:直连式BD120A-L2-25-B1-S9自锁用伺服减速机
3、行星齿轮减速机体积小、质量小,结构紧凑,承载能力大 由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副,因此可使其结构非常紧凑。再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷,从而使得每个齿轮所承受的负荷较小,并允许这些齿轮采用较小的模数。同轴减速机此外,在结构上充分利用了内啮合承载能力大和内齿圈本身的可容体积,从而有利于缩小其外廓尺寸,使其体积小,质量小,结构非常紧凑,且承载能力大。一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2~1/5 (即在承受相同的载荷条件下)。
4、行星齿轮减速机传动效率高 由于行星齿轮传动结构的对称性,即它具有数个匀称分布的行星轮,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。在传动类型选择恰当、结构布置合 r>
禹谟镇机电设备:直连式BD120A-L2-25-B1-S9自锁用伺服减速机
在满足了上述指标后,您就可以根据产品样本,选择在尺寸,轴径和输入法兰与您电机相适配的减速机了。 您还要考虑所配电机的重量。一种减速机只允许与小于一定重量的电机配套,电机太重,长时间运转会损坏减速机的输出法兰。
在减速机家族中,行星减速机以其体积小,传动效率高,减速范围宽,精度高,而被广泛应用于伺服、步进、直流等传动系统中。在保证精密传动的前提下,主要被用来降低转速增大扭矩和降低负载/电机的转动惯量比。
衡量行减速机性能的几个关键技术参数是:减速比,平均寿命,额定输出扭矩,回程间隙,满载效率,噪音,横向/径向受力和工作温度。
减速比:输出转速与输入转速的比值。
级数:太阳轮及其周围的行星轮构成独立的减速轮系,如减速机内只此一个轮系,我们称为“ ”。为得到较大减速比,需多级传动,减速比从3到512。
平均寿命:指减速机在额定负载下,输入转速时的连续工作时间。
额定输出扭矩:指在额定负载下长期工作时允许输出扭矩。输出扭矩是该值的两倍。
回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输出端产生额定扭矩的±2%扭矩时,减速机输入端有一个微小的角位移,此角位移即为回程间隙。单位是“弧分”。
润滑方式:伺服行星减速机在整个使用期间无需润滑。
满载效率:指在负载情况下,减速机的传输效率。它是衡量减速机的一关键指标, 满载效率高的减速机发热少,整体性能好。
噪音:单位是分贝(dB)A。此数值是在输入转速为3000转/分钟时,不带负载,距离减速机一米距离时测量的。
工作温度:是指减速机在连续工作和周期工作状态下,所能允许的温度。
行星减速步进电机的主要结构及特点: 行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速为3,一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比减速机有4级减速。 相对其他减速机,行星减速机具有高刚性,高精度(单级可到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点。 因为这些特点,行星减速机多数是在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。 减速步进电机额定输入转速可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可到10000Nm以上。工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度。 行星减速器内部齿轮采用20CrMnTi渗碳淬火和磨齿具有体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低、输出扭矩大,速比大、效率高、性能安全的特点。兼具功率分流、多齿啮合独用的特性。是一种具有广泛通用性的新型减速机。输入功率可达104kW。
禹谟镇机电设备:直连式BD120A-L2-25-B1-S9自锁用伺服减速机
+
7-19DB19
-K7-19DB19 7-14BK14
-K7-14BK14 7-14BM11
-K7-14BM11
当齿切削工件时,就会引发振动,振动的齿会在工件表面形成波纹。当下一个齿与波纹表面接触时,表面波纹会导致切屑厚度发生变化,变化的切屑厚度又会引起切削力变化,变化的切削力则会引起振动。消除颤振机制的一种方式是,测试系统的动态特性,利用这些测试结果计算出稳定切削区域图,并在其稳定区间内选择切削条件。这种预先控制范围的策略依赖于调整具振动与波纹表面相互吻合,当前后波纹相互吻合时,切屑厚度不再发生变化,振动也就停止了。