热点资讯
其他资讯
- 资阳302S25易切削不锈钢质量保障##有限公司
- 上海022Cr25Ni7Mo4CuWN御钢出品
- 2023泸州M35全硬熟料、M35是什么材料##鼎盛钢材
- 2024哈尔滨1774弹簧钢非标定做、1774价格优惠##益锋钢材
- 2024欢迎访问##延边LGT8000Z-9S4Y多功能电力仪表公司
- 舟山21NiCrMo22原料光圆板材21NiCrMo22原料货全
- nm600耐磨钢板价格表巴音河北邯郸耐磨钢板有哪些
- 娄底2379模具钢盘圆线材、2379交货准时##盘圆线材恒鑫报价
- 宣城Q500方管厂 220x220x5.5方管 厂家定制
- 浙江0cr17ni4cu4nb现货
- 上海供应弹簧钢60Si2MnA光棒、60Si2MnA在这里买更实惠-富宝报价
冯家峪镇机械装置EAMON牌BF180A-L2-30-D1-S7斜齿伺服减速箱
文章来源:ymcdkj
发布时间:2024-05-10 10:32:07
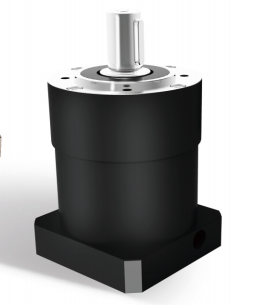
冯家峪镇机械装置:EAMON牌BF180A-L2-30-D1-S7斜齿伺服减速箱
日前,我前往苏州天台商会城区分会会员相当集中的苏州虎丘五金城采访,从他的言谈举止中,初步了解了他的艰苦创业,读懂了他的质朴、低调与谦和。汤学秋,天台坦头镇人,今年38岁。初看上去,他很腼腆。一说话,总是满脸带笑,显然是个相当乐观的人。天台人的成长创业经历,不外乎当学徒,自己店,创企业这三部曲。汤学秋也不例外。汤学秋在家里排行老八,因多,15岁,初一只读完一个学期就辍学,去宁波当学徒,学油漆工。
因此现如今很多企业,在对精密行星齿轮减速机维护的时候,都会采用高分子材料修复技术,因为采用该方法,不需要拆卸,修复的厚度没有受到任何限制。而且在整个过程中,不会对金属材料造成退让的特性,有着较强的吸收性。当然对于一些用户来说,在对精密行星齿轮减速机维护的时候,还应该要明确相关常识,包括具体的工作原理,相应的结构设计与具体的技术参数等问题。
伺服行星减速机的参数介绍
减速比
输出转速:输入转数
段/级数
行星齿轮的套数。由于一套行星齿轮无法满足较大的传动比,有时需要二套或三套来满足用户对较大传动比的要求,也就是说,减速比越大,段/级数越多,效率越低平均寿命
指减速机在额定负载下,额定输入转数时减速机的连续工作时间。
精度
在高速机械往复运动中到的关键在于尽量减少通过运动产生的角偏差。精度取决于两个值,一个是于加载有关的偏转角,涉及到回程间隙和扭转刚度;另一个是于运动控制有关的偏转角,涉及到同步偏差问题。
回程间隙齿隙
将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙。
额定输出扭矩
指减速机连续长时间工作时可以加载的力矩,条件应满足负载均匀,安全系数大于1.
加速扭矩
指工作周期每小时少于1000次时允许短时间加载.不能超过10000次。
紧急制动扭矩
指减速机输出端所能加载的力矩,这个力矩可在减速机寿命期内加载1000次,不能超过1000次。
空载扭矩
指加载到减速机上的以克服减速机内摩擦力的力矩。
扭矩
指减速机在静态条件或频繁启动条件下所能承受的输出扭矩,通常指峰值负载或启动负载。
实际所需扭矩
所需扭矩取决于应用场合的实际工况,拟选减速机的额定扭矩必须大于这个扭矩。
侧倾扭矩
指轴向力和径向力作用于输出端轴承上径向受力点的力矩。
轴向力
是指平行于轴心的一个力,它的作用点与输出轴端有一定的轴向偏差时,会形成一个额外的弯挠力矩。轴向力超过额定值时,需用联轴节来抵消这种弯挠力。
径向力
指垂直作用于轴向力的一个力,它的作用点与轴端有一定的轴向距离,这个点成一个杠杆点,横向力形成一个弯挠力矩。
轴伸径向载荷
选择减速机的附加依据是输出轴伸出端上的径向载荷和轴向载荷。轴的强度和轴承的承载能力决定了许用轴伸的径向载荷。产品样本中给出的允许值是指在 不利的方向作用在轴伸出端中点的力。当作用力不在中点时,越接近轴肩,允许的径向载荷就越大;相反,作用点离轴肩越远,允许的径向载荷就越小。
安全系数
安全系数等于减速机的额定输入功率与电机功率的比值。
使用系数
使用系数表现减速机的应用特性,它考虑到减速机的负载类型和每日工作时间。
力矩
减速机的以及电机与减速机的连接(输入轴采用性联轴器要求),都是有力矩要求。建议使用力矩扳手来完成步骤。
交流伺服系统反馈分为电流反馈、速度反馈和位置反馈三个部分。其中电流环的控制是为了保证定子电流对矢量控制指令的准确快速 。 电流环是内环,SVPWM控制算法的实现主要集中在电流环上,电流环性能指标的好坏,特别是动态特性,将影响速度、位置环。 PI调节器不同于P调节器的特点: 1) P调节器的输出量总是正比于其输入量; 2) 而PI调节器输出量的稳态值与输入无关, 而是由它后面环节的需要决 定的。后面需要PI调节器多么大的输出值, 它就能多少, 直到饱和为止。 电流环常采用PI控制器,目的是把P控制器不为0 的静态偏差变为0。电流环控制器的作用有以下几个方面: 3) 内环;在外环调速的过程中,它的作用是使电流紧跟其给定电流值(即 外环调节器的输出); 4) 对电网电压波动起及时抗干扰作用; 5) 在转速动态过程中(起动、升降速)中,保证获得电机允许的电流-即加速了动态过程;6) 过载或者转时,限制电枢电流的值,起快速的自动保护作用。 电流环的控制指标主要是以跟随性能为主的。在稳态上,要求无静差;在动态上,不允许电枢电流在突加控用时有太大的超调,以保证电流电流在动态过程中不超过允许值。 双闭环电机调速过程中所希望达到的目标: 1) 起动过程中: 只有电流负反馈, 没有转速负反馈。 2) 达到稳态后: 转速负反馈起主导作用; 电流负反馈仅为电流随动子系统。
+
00-S2-P2